
1.2飞机起落架的布置形式
起落架的布置形式是指飞机起落架支柱(支点)的数目和其相对于飞机重心的布置特点。目前,飞机上通常采用四种起落架形式:
图1.1 后三点式起落架
后三点式起落架:这种起落架有一个尾支柱和两个主起落架。并且飞机的重心在主起落架之后。后三点式起落架多用于低速飞机上,因此在四十年代中叶以前曾得到广泛的应用。目前这种形式的起落架主要应用于装有活塞式发动机的轻型、超轻型低速飞机上。
优点:
①在飞机上易于装置尾轮。与前轮相比,尾轮结构简单,尺寸、质量都较小。
②正常着陆时,三个机轮同时触地,这就意味着飞机在飘落(着陆过程的第四阶段)时的姿态与地面滑跑、停机时的姿态相同。也就是说,地面滑跑时具有较大的迎角,因此,可以利用较大的飞机阻力来进行减速,从而可以减小着陆时和滑跑距离。因此,早期的飞机大部分都是后三点式起落架布置形式。
缺点:
①大速度滑跑时,遇到前方撞击或强烈制动,容易发生倒立现象(俗称拿大顶)。因此为了防止倒立,后三点式起落架不允许强烈制动,因而使着陆后的滑跑距离有所增加。
②如着陆时的实际速度大于规定值,则容易发生“跳跃”现象。因为在这种情况下,飞机接地时的实际迎角将小于规定值,使机尾抬起,只是主轮接地。接地瞬间,作用在主轮的撞击力将产生抬头力矩,使迎角增大,由于此时飞机的实际速度大于规定值,导致升力大于飞机重力而使飞机重新升起。以后由丁速度很快地减小而使飞机再次飘落。这种飞机不断升起飘落的现象,就称为“跳跃”。如果飞机着陆时的实际速度远大于规定值,则跳跃高度可能很高,飞机从该高度下落,就有可能使飞机损坏。
③在起飞、降落滑跑时是不稳定的。如过在滑跑过程中,某些干扰(侧风或由于路面不平,使两边机轮的阻力不相等)使飞机相对其轴线转过一定角度,这时在支柱上形成的摩擦力将产生相对于飞机质心的力矩,它使飞机转向更大的角度。④在停机、起、落滑跑时,前机身仰起,因而向下的视界不佳。
基于以上缺点,后三点式起落架的主导地位便逐渐被前三点式起落架所替代,目前只有一小部分小型和低速飞机仍然采用后三点式起落架。
图1.2前三点式起落架
2.2 A320飞机起落架分析
2.2.1 A320飞机起落架的概述
空客A320起落架,该起落架为常规前三点可收放式,由一个前起落架和两个主起落架组成。起落架可起降60000次。生命周期的耐久性设计参照于FAR和JAR(不考虑损伤容限),主起落架的检修相隔时间是20000次着陆或者10年。起落架的操控由传感器和两套独立的起落架控制单元电脑(LGCIU)电传操纵。
前起落架装有油液氮气式缓冲支柱和一对机轮。机轮为双轮连锁形式。为了改善飞机滑行时的灵活性,前起落架机轮是可操纵的。当起落架离开地面时,机轮在纠偏机构的作用下回到中立位置。每个主起落架装有油液氮气式缓冲支柱和一对机轮,其中每个机轮有一个液压刹车装置。前、主起落架的正常收放用液压系统进行,在飞行中均收到机身内。如图2-1。
图 2-1 A320飞机起落架总体布局外形
空客A320飞机飞机起落架具有如下特点:
(1)常规前三点式起落架,直接作用式油气缓冲器。
(2)主起落架侧向收起,前起落架前向收起。
(3)两套起落架交互式控制单元(LGCIU)的电传操纵。
(4)具有自由放下/液压驱动应急弹下两种模式。
(5)对起落架的回收释放进行交互式使用。
(6)一套LGCIU系统失灵,另一套系统可切换控制。
(7)在速度高于260节时通过液压来自动使起落架降压以防止变速杆卡在中性位置。
(8)利用新型探测器来代替微型开关来进行位置传感。
左右轮距:7.59m,如图2-2。
图2-2 主起落架左右轮距
2.2.2 A320飞机起落架的收放分析
A.主起落架收放运动:
在起飞过程中主起落架上的载荷逐渐减少。飞机起飞过程中,减震器会逐渐伸长,使得支柱轴向的长度增加。这使飞机在起飞过程中以大迎角滑行。
当起落架要向上收起的时候,液压操纵门会打开,以便起落架收入起落架舱。下位锁作动筒将锁支柱解锁,主起落架作动筒将主起落架收入起落架舱。在起落架收回过程中,刹车/转向控制组件会自动地进行短时间的刹车,这样可以阻止刹车机轮在收入起落架舱前的旋转。在主起落架锁入主起落架舱之后,液压操纵门会关闭。
当起落架要放下的的时候,液压操纵门会先打开。收回的作动筒会伸展使起落架支柱放下伸出。侧边支柱和锁支柱会移到正中位置上面使起落架在放下位置锁住。在起落架放下之后门会关上。起落架放下之后减震器吸收着陆载荷。如图2-6所示:
图2-6主起落架收放示意图
3.起落架零件组的强度计算
3.1飞机前起落架的材料属性
前起落架减震支柱结构为复杂的三维结构(材料为 300M),其安全工作许用力为 947~1050MPa。材料的弹性模量为210e3MPa,泊松比为 0.28。
3.2飞机前起落架的整体约束和受力分析
任何实际的结构都必须设置和支承于某一基础或者其它结构上,才能承
受外载荷,正常和可靠地工作。相应的有限元计算模型必须根据工程实际施
加约束,才能保证计算顺利进行,并能使计算结果与实际情况吻合。在传力
过程中,约束部分将承受反力,同时也阻止结构在约束方向的位移。
根据图3.1可以看出,前起落架结构复杂,在实际工作中,地面载荷通
过机轮轮胎传递给轮轴,轮轴再传给内筒,然后由内筒将地面载荷传递到外
筒上,内、外筒之间的腔内充满高压油气,用来吸收地面冲击能量,外部还
有扭力臂相连。整个前起落架的减震支柱外筒是通过圆柱形撑杆与飞机机身
相连的。因此,如何才能真实模拟实际约束和受载情况就十分重要了。
3.1 前起落架结构图
收放撑杆为二力杆,主要承受拉压力的作用,不承受弯矩.由于收放撑
杆不是我们要考虑的部位,只对其制作了简单的模型,采用圆柱结构。但由
于收放撑杆是与坐标轴不平行的斜支撑,不能简单的用坐标轴方向的约束替
代,同时还要实现它是二力杆的功能,我们采用了等效杆单元来模拟。
等效杆单元法即所谓的“代替杆法”。它是在斜支座作用点处用一根与斜
支座轴线重合的杆件来代替实际约束(图 3.2),代替杆的截面面积与实际杆
件截面面积相当,代替杆的另一端用铰支座约束。具有这样横截面面积的杆
件,其轴向刚度与被代替的约束的轴向刚度相等,其产生的效果同斜支座是
等效的。代替杆的轴力也就是斜支座的支反力,这样处理的优点是只需要增
加几个额外的杆件和节点,无需对程序等作任何的改变。
4.2.1.A320前起落架运动仿真
首先导入已经建好的起落架零部件模型。不要一次性全部导入,否则可能由于零部件过多造成整个界面的混乱。将插入的零部件再定义成Motion里面的体。
定义体的时候最好最好按由上自下的方法插入部件,部件最好是跟前面插入的部件存在装配关系,这样可以边插入边装配,避免所有部件插入之后再装配造成的混乱。这里并不在CATIA模块进行装配,因为在CATIA模块装配的话可能造成约束关系重复,收放运动时应具备的自由度可能就被约束住了。这些约束在装配时可以随意调整各个零件在装配件中的位置,使装配图能够充分反映各个零件的位置和作用。但在运动模拟时,这些“多余”的约束则会影响起落架收放系统运动过程的模拟,使得模拟过程出错。由于装配过程中的约束凌乱而繁多,所以这里选择在创建运动副时再重新生成约束,而不进行单独的装配。
根据A320前起落架收放系统的运动形式和各零件的之间的关系,定义合适的运动副,其中有旋转副、圆柱副、固定副、平移副等21个运动副。所有的运动副都加好后,其自由度应等于2(DOF=2),装配过程中的各零件之间的约束也同时生成。约束加载完成后的界面如图4-2所示。
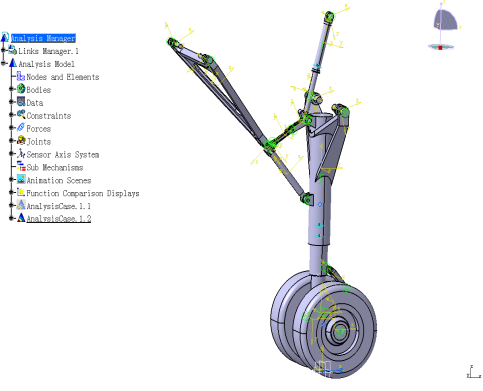图4-2 前起体全部定义完成及约束加载完成后的界面





:新建三维场景)